active & interactive robotics lab
undergraduate research assistant · university of waterloo · may 2025 – present

role
Undergraduate Research Assistant building a real-time humanoid-robot rehabilitation platform for children with cerebral palsy, under the supervision of the AIR Lab at the University of Waterloo.
achievements
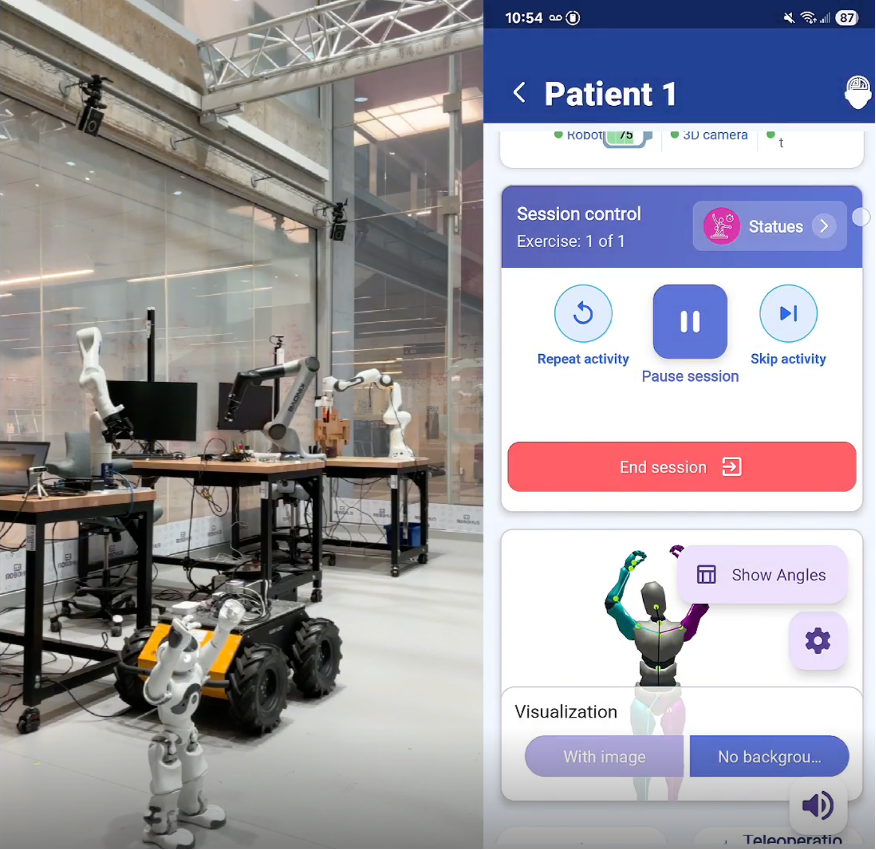
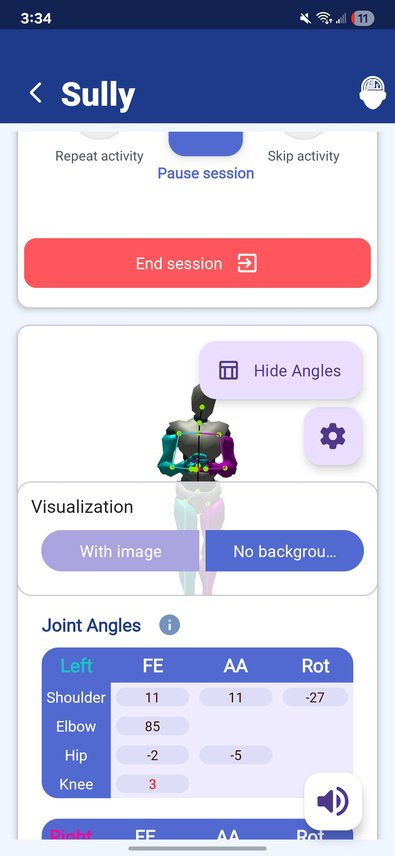
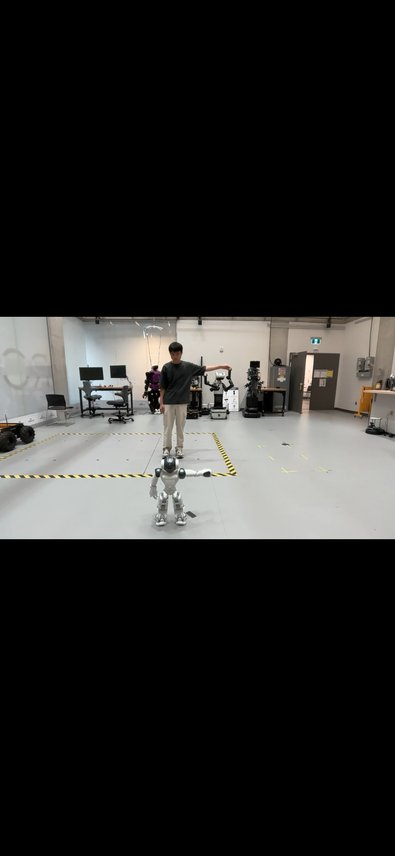
- Architected a real-time humanoid-robot rehabilitation platform on Ubuntu using Intel RealSense D435i depth cameras, Nuitrack pose-tracking SDK, and NAOqi robot control — autonomously guides children with cerebral palsy through motor therapy, reducing physiotherapist supervision requirements by 25%
- Built a modular data-collection framework integrating synchronized pose, heart-rate, and behavioral streams; cut per-experiment setup time from 2 hours to 15 minutes
- Authored IRB ethics applications and SOPs; presented research findings to clinical partners and onboarded 3 new lab members
tools + tech
PythonROSIntel RealSense D435iNuitrack SDKNAOqiUbuntuOpenCV